
อุปกรณ์ที่ต้องใช้ก็คือ
1. 2WD Smart Robot Car Chassis Kits
2. Arduino UNO R3 - Made in italy
3. IR Infrared Obstacle Avoidance Sensor Module จำนวน 2 ชิ้น
4. Motor Drive Module L298N
5. สาย Jumper Female to Male ยาว 20cm.
6. สาย Jumper Male to Male ยาว 20cm.
7. รางถ่านแบบ 18650 ใส่ถ่าน 2 ก้อน
8. แบตเตอรี่ลิเธียม 18650 จำนวน 2 ก้อน
9. เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 6 mm.
10. สกรูหัวกลมน็อตตัวเมีย ขนาด 3มม ยาว12 มม.
11. Mounting Bracket for HC-SR04 Ultrasonic Module แบบสั้น
12. แผ่นอะคริลิค
การทำงานของ หุ่นยนต์เดินตามเส้น Arduino
เรียนรู้ การใช้งาน IR Infrared Obstacle Avoidance Sensor Module เพิ่มเติมที่
https://robotsiam.blogspot.com/2016/10/ir-infrared-obstacle-avoidance-sensor.html
เซ็นเซอร์แบบนี้จะมีช่วงในการทำงาน หรือ ระยะในการตรวจจับจะได้ใกล้กว่าแบบ Opposed mode ซึ่งในสภาวะการทำงานปกติ พื้นเเป็นสีขาว ตัวรับ Receiver จะสามารถรับสัญญาณแสงจากตัวส่ง Emitter ได้ตลอดเวลา เนื่องจากลำแสง สะท้อนกลับมาได้ จะแสดงค่า เป็น 0

และ เมื่อพื้นเป็นสีดำ แสงสะท้อนกลับมาไม่ได้ จึงทำให้ตัวรับ Receiver ไม่สามารถรับลำแสงที่จะสะท้อนกลับมาได้ จะแสดงค่า เป็น 1

เซ็นเซอร์ตรวจสอบการสะท้อนแสงกลับมา ได้หรือไม่ แล้วส่งสัญญาณไปยัง Arduino Uno R3 แล้ว Arduino Uno R3 จึงไปสั่งให้มอเตอร์ทำงาน โดย Motor Drive Module L298N ให้เป็นไปตามการส่งค่ามาของเซ็นเซอร์

โปรเจค หุ่นยนต์เดินตามเส้น 2 เซ็นเซอร์ Arduino นี้ เราจะใช้ 2 เซ็นเซอร์อินฟราเรด คือด้านซ้ายและด้านขวา โดย เมื่อเซ็นเซอร์ ทั้งด้านซ้ายและด้านขวา ตรวจสอบแล้วเป็นพื้นสีขาว ลำแสง สามารถสะท้อนกลับมาได้ทั้งคู่ ( 0 , 0 ) ให้หุ่นยนต์เคลื่อนที่ไปข้างหน้า

หากเซ็นเซอร์ซ้ายมาพบพื้นสีดำ และ เซ็นเซอร์ขวาพบพื้นสีขาว ( 1 , 0 ) ให้หุ่นยนต์เลี้ยวไปทางด้านซ้าย

หากเซ็นเซอร์ขวามาพบพื้นสีดำ และ เซ็นเซอร์ซ้ายพบพื้นสีขาว ( 0 , 1 ) ให้หุ่นยนต์เลี้ยวไปทางด้านขวา

เราจะสร้าง หุ่นยนต์เดินตามเส้น Arduino และ เขียนโปรแกรมตามเงื่อนไขที่แสดงในตารางด้านบน
เริ่มต้นด้วยการ ประกอบ Smart Robot Car Chassis Kit




ต่อวงจร Arduino UNO กับ Sensor ทั้ง 2 ตัว
เข้า ขา D2 และ D3 ตามรูป
Sensor <-> UNO
VCC (ซ้าย,ขวา) <-> 5V
GND (ซ้าย,ขวา) <-> GND
OUT (ซ้าย) <-> D2
OUT (ขวา) <-> D3

ตรง 5V ของ Arduino จะมี 3 สายใช้ร่วมกัน ให้เชื่อมต่อ บัตกรี รวมกันก่อนแล้วจึงต่อเข้าไปที่ 5V
ตัดแผ่นอะคริลิค ขนาด 3 x 10 เซ็นติเมตร
ประกอบ เซ็นเซอร์ซ้ายและขวา

ยึดเข้ากับ Mounting Bracket for HC-SR04 Ultrasonic Module แบบสั้น

ยึดเข้ากับ ตัวหุ่นยนต์

การปรับแต่ง เซ็นเซอร์ให้ตรวจจับเส้น
เมื่อต่อวงจร หุ่นยนต์เดินตามเส้น เสร็จแล้ว ให้ต่อสาย USB จากคอมพิวเตอร์ เข้ากับ Arduino UNO R3 ปรับ ระยะการตรวจจับของเซ็นเซอร์ โดยใช้ไขควง ปรับ ที่ VR (สี่เหลี่ยมสีฟ้า-ขาว) โดยใช้มือเคลื่อนที่หุ่นยนต์ผ่านเส้นสีดำและพื้นสีขาว
ให้ปรับเซ็นเซอร์ทั้ง 2 ตัว ดังนี้ ถ้าอยู่บนพื้นสีขาว ให้ไฟ LED ติด 2 ดวง และ ถ้าเข้าไปในบนเทปสีดำ ให้ ไฟ LED ติด 1 ดวง




อัพโหลดโปรแกรม
เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด Arduino UNO R3
/*-------definning Inputs------*/
int LS = 2; // left sensor
int RS = 3; // right sensor
/*-------definning Outputs------*/
int LM1 = 4; // left motor
int LM2 = 5; // left motor
int RM1 = 6; // right motor
int RM2 = 7; // right motor
/*-------PWM ควบคุมความเร็วมอเตอร์-----*/
int PWM1 = 10; // PWM left motor
int PWM2 = 11; // PWM right motor
int SPEED = 90; // Speed PWM สามารถปรับความเร็วได้ถึง 255
void setup()
{
pinMode(LS, INPUT);
pinMode(RS, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
pinMode(PWM1, OUTPUT);
pinMode(PWM2, OUTPUT);
}
void loop()
{
if (!(digitalRead(LS)) && !(digitalRead(RS))) // Move Forward
{
analogWrite(PWM1, SPEED);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
analogWrite(PWM2, SPEED);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if (!(digitalRead(LS)) && digitalRead(RS)) // Turn right
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
analogWrite(PWM2, SPEED);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if (digitalRead(LS) && !(digitalRead(RS))) // turn left
{
analogWrite(PWM1, SPEED);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
if (digitalRead(LS) && digitalRead(RS)) // stop
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
}
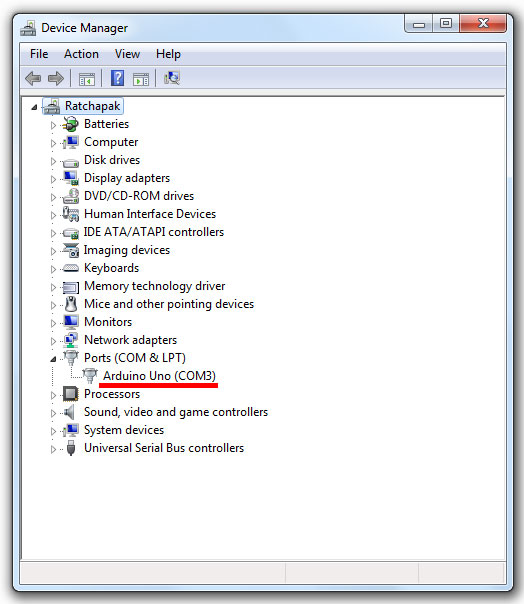
1.ตรวจสอบการติดตั้งไดรเวอร์ ของ Arduino UNO
ไปที่หน้าจอคอมพิวเตอร์ คลิกขวาที่ Computet -> Properties

คลิกที่ Device Manager

ไปที่ Ports (COM & LPT) จะพบ ไดร์เวอร์ ของ Arduino UNO ในตัวอย่างเป็น "COM3"

2. ตรวจสอบการเลือก Board
ให้เลือก Board : เป็น Arduino/Genuino UNO

3. ตรวจสอบ ต้องมี Port : ในตัวอย่างเป็น COM3
(ถ้ายังว่าง หรือ เป็น COM1 ให้ตรวจสอบการติดตั้งไดร์เวอร์ การต่อสาย USB ของ Arduino UNO)

ถ้าทุกอย่างถูกต้อง ให้คลิกเครื่องหมายตรงไป เพื่ออัพโหลด

4. รอกระทั่ง จนขึ้น Done uploading.
แสดงว่า สามารถอัพโหลดโปรแกรมเข้า Arduino UNO สําเร็จแล้ว

วีดีโอผลลัพธ์การทำงานของ หุ่นยนต์เดินตามเส้น 2 เซ็นเซอร์ Arduino


หากเซ็นเซอร์ซ้ายมาพบพื้นสีดำ และ เซ็นเซอร์ขวาพบพื้นสีขาว ( 1 , 0 ) ให้หุ่นยนต์เลี้ยวไปทางด้านซ้าย


หากเซ็นเซอร์ทั้งสองมาอยู่บนเส้นสีดำทั้งคู่ ( 1 , 1 ) ให้หุ่นยนต์หยุด


โดยสรุป มี 4 เงื่อนไขที่ หุ่นยนต์เดินตามเส้น Arduino รับค่าจากเซ็นเซอร์ซ้ายและขวา
คือ (0 ,0) | (0 ,1) | (1 , 0) | (1 ,1 ) แสดงตามตารางด้านล่าง
คือ (0 ,0) | (0 ,1) | (1 , 0) | (1 ,1 ) แสดงตามตารางด้านล่าง
อินพุต
|
เอาต์พุต
|
การเคลื่อนที่ของหุ่นยนต์
| ||||
เซ็นเซอร์ซ้าย
|
เซ็นเซอร์ขวา
|
มอเตอร์ซ้าย
|
มอเตอร์ขวา
| |||
LS
|
RS
|
LM1
|
LM2
|
RM1
|
RM2
| |
0
|
0
|
0
|
0
|
0
|
0
|
เดินหน้า
|
0
|
1
|
1
|
0
|
0
|
0
|
เลี้ยวขวา
|
1
|
0
|
0
|
0
|
1
|
0
| เลี้ยวซ้าย |
1
|
1
|
1
|
0
|
1
|
0
|
หยุด
|
เราจะสร้าง หุ่นยนต์เดินตามเส้น Arduino และ เขียนโปรแกรมตามเงื่อนไขที่แสดงในตารางด้านบน
เริ่มต้นด้วยการ ประกอบ Smart Robot Car Chassis Kit

ต่อวงจร Arduino UNO กับ L298N Motor Driver ตามรูปการต่อวงวงจร
นำไฟจากแบตเตอรี่ลิเธียม 18650 ไปต่อตรงกับ L298N Motor Driver (ไม่ต่อกับ พอร์ต Power Supply ของ บอร์ด Arduino UNO R3 ) และ นำไฟ +5 โวลต์ ที่ออกจาก L298N Motor Driver ต่อออกไปที่ 5V ของ Arduino UNO R3 ตามรูปการต่อวงวงจร

*** VCC ของ Arduino UNO R3 คือ 5V ***
ต่อวงจร Arduino UNO กับ Sensor ทั้ง 2 ตัว
เข้า ขา D2 และ D3 ตามรูป
Sensor <-> UNO
VCC (ซ้าย,ขวา) <-> 5V
GND (ซ้าย,ขวา) <-> GND
OUT (ซ้าย) <-> D2
OUT (ขวา) <-> D3

ตรง 5V ของ Arduino จะมี 3 สายใช้ร่วมกัน ให้เชื่อมต่อ บัตกรี รวมกันก่อนแล้วจึงต่อเข้าไปที่ 5V
ตัดแผ่นอะคริลิค ขนาด 3 x 10 เซ็นติเมตร
ประกอบ เซ็นเซอร์ซ้ายและขวา

ยึดเข้ากับ Mounting Bracket for HC-SR04 Ultrasonic Module แบบสั้น

ยึดเข้ากับ ตัวหุ่นยนต์

การปรับแต่ง เซ็นเซอร์ให้ตรวจจับเส้น
เมื่อต่อวงจร หุ่นยนต์เดินตามเส้น เสร็จแล้ว ให้ต่อสาย USB จากคอมพิวเตอร์ เข้ากับ Arduino UNO R3 ปรับ ระยะการตรวจจับของเซ็นเซอร์ โดยใช้ไขควง ปรับ ที่ VR (สี่เหลี่ยมสีฟ้า-ขาว) โดยใช้มือเคลื่อนที่หุ่นยนต์ผ่านเส้นสีดำและพื้นสีขาว
ให้ปรับเซ็นเซอร์ทั้ง 2 ตัว ดังนี้ ถ้าอยู่บนพื้นสีขาว ให้ไฟ LED ติด 2 ดวง และ ถ้าเข้าไปในบนเทปสีดำ ให้ ไฟ LED ติด 1 ดวง

ถาพรวมเมื่อต่อเสร็จแล้ว



อัพโหลดโปรแกรม
เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด Arduino UNO R3
/*-------definning Inputs------*/
int LS = 2; // left sensor
int RS = 3; // right sensor
/*-------definning Outputs------*/
int LM1 = 4; // left motor
int LM2 = 5; // left motor
int RM1 = 6; // right motor
int RM2 = 7; // right motor
/*-------PWM ควบคุมความเร็วมอเตอร์-----*/
int PWM1 = 10; // PWM left motor
int PWM2 = 11; // PWM right motor
int SPEED = 90; // Speed PWM สามารถปรับความเร็วได้ถึง 255
void setup()
{
pinMode(LS, INPUT);
pinMode(RS, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
pinMode(PWM1, OUTPUT);
pinMode(PWM2, OUTPUT);
}
void loop()
{
if (!(digitalRead(LS)) && !(digitalRead(RS))) // Move Forward
{
analogWrite(PWM1, SPEED);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
analogWrite(PWM2, SPEED);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if (!(digitalRead(LS)) && digitalRead(RS)) // Turn right
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
analogWrite(PWM2, SPEED);
digitalWrite(RM1, HIGH);
digitalWrite(RM2, LOW);
}
if (digitalRead(LS) && !(digitalRead(RS))) // turn left
{
analogWrite(PWM1, SPEED);
digitalWrite(LM1, HIGH);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
if (digitalRead(LS) && digitalRead(RS)) // stop
{
digitalWrite(LM1, LOW);
digitalWrite(LM2, LOW);
digitalWrite(RM1, LOW);
digitalWrite(RM2, LOW);
}
}
ก่อนอัพโหลดให้ตรวจสอบ
1.ตรวจสอบการติดตั้งไดรเวอร์ ของ Arduino UNO
ไปที่หน้าจอคอมพิวเตอร์ คลิกขวาที่ Computet -> Properties

คลิกที่ Device Manager

ไปที่ Ports (COM & LPT) จะพบ ไดร์เวอร์ ของ Arduino UNO ในตัวอย่างเป็น "COM3"
2. ตรวจสอบการเลือก Board
ให้เลือก Board : เป็น Arduino/Genuino UNO

3. ตรวจสอบ ต้องมี Port : ในตัวอย่างเป็น COM3
(ถ้ายังว่าง หรือ เป็น COM1 ให้ตรวจสอบการติดตั้งไดร์เวอร์ การต่อสาย USB ของ Arduino UNO)

ถ้าทุกอย่างถูกต้อง ให้คลิกเครื่องหมายตรงไป เพื่ออัพโหลด

4. รอกระทั่ง จนขึ้น Done uploading.
แสดงว่า สามารถอัพโหลดโปรแกรมเข้า Arduino UNO สําเร็จแล้ว

วีดีโอผลลัพธ์การทำงานของ หุ่นยนต์เดินตามเส้น 2 เซ็นเซอร์ Arduino