
สิ่งประดิษฐ์ทางวิทยาศาสตร์ โดยใช้มอเตอร์ ทำจากเศษวัสดุ โดยเราจะประดิษฐ์ รถบังคับ Arduino จาก จากแผ่นซีดี ควบคุมด้วยแอพแอนดรอยด์
อุปกรณ์ที่ต้องใช้ก็คือ
1. แผ่น CD ที่ไม่ใช้แล้ว จำนวน 2 แผ่น
2. Arduino UNO R3 - Made in italy
3. Motor Drive Module L298N
4. HC-05 Bluetooth Master Slave
5. สาย Jumper Female to Male ยาว 10cm.
6. สาย Jumper Male to Male ยาว 10cm.
7. เกียร์มอเตอร์และล้อรถ จำนวน 2 ชุด
8. ล้อหน้า สำหรับ 2WD
9. รางถ่าน AA 6 ก้อน 9 โวลต์
10. ถ่านอัลคาไลน์ ขนาด AA จำนวน 6 ก้อน
เตรียมปืนยิงกาว

เตรียมแผ่น CD ที่ไม่ใช้แล้ว จำนวน 2 แผ่น

ใช้ปืนยิงกาวยึด CD 2 แผ่นเข้าด้วยกันทั้ง 2 ด้าน ดังรูป


ยึด มอเตอร์ตัวที่1 เข้าที่ด้านล่าง ของแผ่น CD โดยหันขั้วของมอเตอร์เข้าด้านใน

ยึด มอเตอร์ตัวที่2 เข้าที่ด้านล่าง ของแผ่น CD โดยหันขั้วของมอเตอร์เข้าด้านใน

ประกอบ ล้อรถ ทั้ง 2 ล้อ เข้า กับ เกียร์มอเตอร์

ยึด ล้อหน้า

เมื่อกลับดูด้านบน

ยึด Motor Drive Module L298N

ยึด Arduino UNO R3

ยึด รางถ่าน AA 6 ก้อน 9 โวลต์


ประกอบวงจร


ต่อสาย สีดำ และ สีแดง ของรางถ่าน AA เข้ากับ Motor Driver ดังรูป

ต่อสาย สีดำ และ สีแดง ของรางถ่าน AA เข้ากับ Motor Driver ดังรูป

ต่อสาย 5V ของ Motor Drive Module L298N ไปยัง 5V ของ Arduino UNO R3

ต่อสาย จาก Motor Drive Module L298N ไปยัง มอเตอร์ ทั้ง 2 ตัว

บัดกรี เชื่อมสาย เข้ากับมอเตอร์ด้านล่างทั้ง 2 ตัว

ต่อสาย ระหว่าง Motor Drive Module L298N กับ Arduino UNO R3
เรียนรู้เพิ่มเติม : https://robotsiam.blogspot.com/2016/08/l298n-motor-driver-connect-arduino-r3.html
เรียนรู้เพิ่มเติม : https://robotsiam.blogspot.com/2016/08/l298n-motor-driver-connect-arduino-r3.html

*** VCC ของ Arduino UNO R3 คือ 5V ***



ต่อสาย ระหว่าง HC-05 Bluetooth Master Slave กับ Arduino UNO R3

เรียนรู้เพิ่มเติม : https://robotsiam.blogspot.com/2016/08/hc-05-bluetooth-module.html
HC-05 ใช้ไฟ 5V จุดเดียวกับ L298N จำเป็น ต้อง เชื่อมต่อทั้ง 2 สาย ร่วมกันก่อน แล้วจึงต่อลงไปที่ 5V อีกครั้ง
HC-05 ใช้ไฟ 5V จุดเดียวกับ L298N จำเป็น ต้อง เชื่อมต่อทั้ง 2 สาย ร่วมกันก่อน แล้วจึงต่อลงไปที่ 5V อีกครั้ง

บัดกรี สาย 5V ทั้ง 3 สายเข้า ด้วยกัน

แล้วจึงต่อลงไปที่ 5V อีกครั้ง


ต่อสายสีดำ GND <-> GND
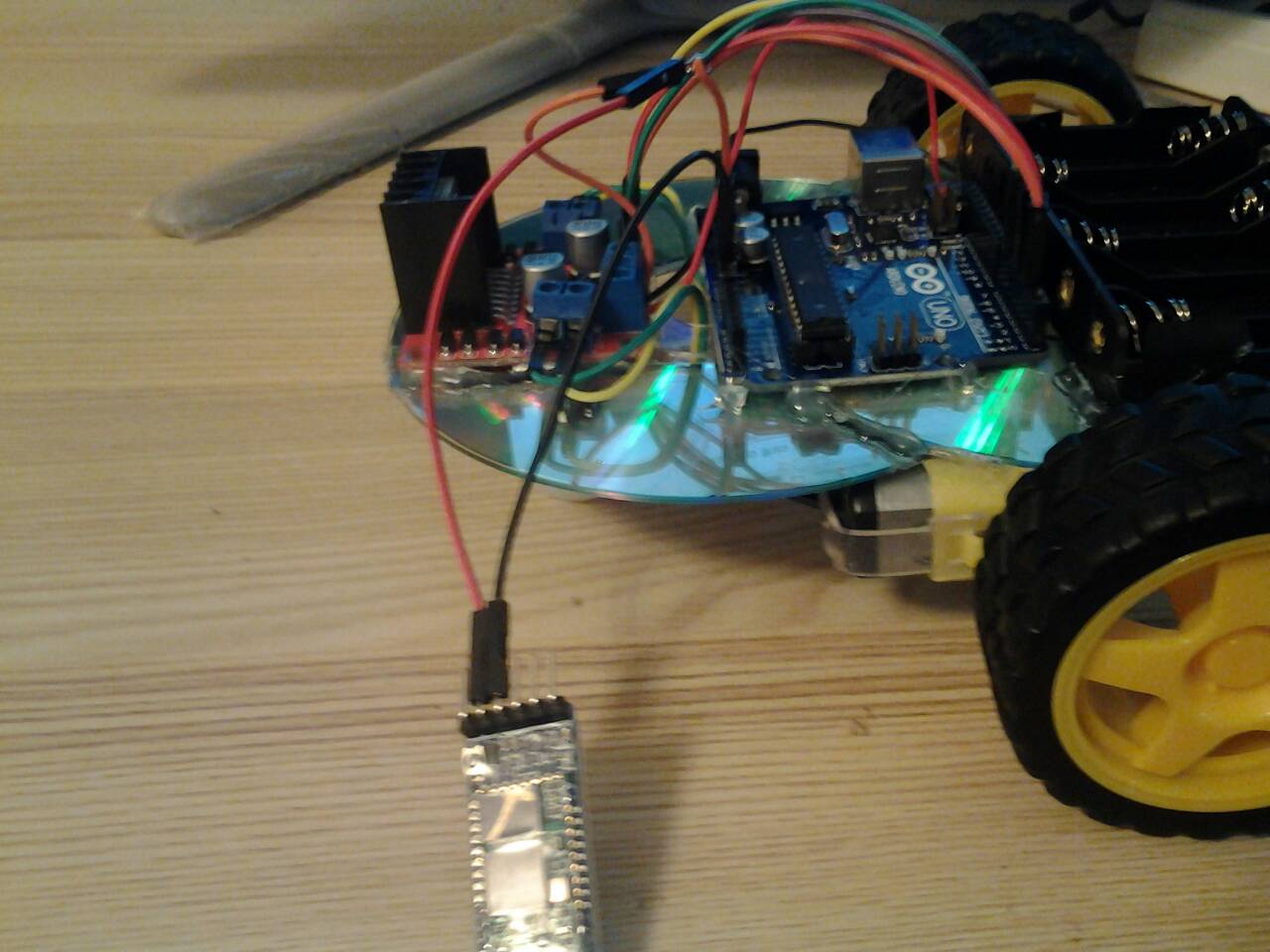
ต่อสายที่เหลือ ระหว่าง HC-05 กับ บอร์ด UNO พิน 8 , 9 , 10

เชื่อมต่อ สายกราวด์ GND ของ L298N กับ บอร์ด UNO เข้าด้วยกัน โดยถอดสายสีดำของรางถ่าน ออกจาก L298N บัดกรี หรือ มัดรวมกัน แล้วใส่คืน GND ของ L298N อีกครั้ง

ต่อ สายกราวด์ GND ที่เชื่อมต่อ รางถ่านสีดำ กับ GND ของ L298N ไว้แล้ว ไปยัง GND ของ บอร์ด UNO

เชื่อมต่อสาย USB ระหว่าง คอมพิวเตอร์ กับ บอร์ด UNO

เรียนรู้เพิ่มติม : https://robotsiam.blogspot.com/2016/08/hello-world-arduino-uno-r3.html
เปิดโปรแกรม Arduino (IDE) เขียน โค้ด และ Upload ไปยังบอร์ด Arduino UNO ดังนี้
#include <SoftwareSerial.h>
SoftwareSerial BTSerial(9, 10);
int dir1PinA = 2;
int dir2PinA = 3;
int speedPinA = 6;
int dir1PinB = 4;
int dir2PinB = 5;
int speedPinB = 7;
int SPEED = 191; // Speed PWM สามารถปรับความเร็วได้ถึง 255
void setup()
{
pinMode(dir1PinA,OUTPUT);
pinMode(dir2PinA,OUTPUT);
pinMode(speedPinA,OUTPUT);
pinMode(dir1PinB,OUTPUT);
pinMode(dir2PinB,OUTPUT);
pinMode(speedPinB,OUTPUT);
pinMode(8,OUTPUT);
digitalWrite(8, HIGH);
Serial.begin(9600);
BTSerial.begin(9600);
}
void loop()
{
if (BTSerial.available())
Serial.write(BTSerial.read());
if (Serial.available())
BTSerial.write(Serial.read());
if (BTSerial.available() > 0) {
int inByte = BTSerial.read();
int speed;
switch (inByte) {
case 'F':
analogWrite(speedPinA, SPEED);
analogWrite(speedPinB, SPEED);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinA, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 1 Forward");
Serial.println("Motor 2 Forward");
Serial.println(" ");
break;
case 'S':
analogWrite(speedPinA, 0);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Stop");
analogWrite(speedPinB, 0);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Stop");
Serial.println(" ");
break;
case 'B':
analogWrite(speedPinA, SPEED);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back");
analogWrite(speedPinB, SPEED);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back");
Serial.println(" ");
break;
case 'L':
analogWrite(speedPinA, 0);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Left");
analogWrite(speedPinB, SPEED);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Left");
Serial.println(" ");
break;
case 'R':
analogWrite(speedPinA, SPEED);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Right");
analogWrite(speedPinB, 0);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Right");
Serial.println(" ");
break;
case 'I':
analogWrite(speedPinA, 150);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Forward L");
analogWrite(speedPinB, SPEED);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Forward L");
Serial.println(" ");
break;
case 'G':
analogWrite(speedPinA, SPEED);
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
Serial.println("Motor 1 Forward R");
analogWrite(speedPinB, 150);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("Motor 2 Forward R");
Serial.println(" ");
break;
case 'J':
analogWrite(speedPinA, 200);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back L");
analogWrite(speedPinB, SPEED);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back L");
Serial.println(" ");
break;
case 'H':
analogWrite(speedPinA, SPEED);
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
Serial.println("Motor 1 Back R");
analogWrite(speedPinB, 200);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("Motor 2 Back R");
Serial.println(" ");
break;
default:
for (int thisPin = 2; thisPin < 11; thisPin++)
{
digitalWrite(thisPin, LOW);
}
}
}
}
หาแก้วสำหรับ ยกตัวรถ เพื่อไม่ให้ล้อแตะพื้น สำหรับการทดสอบ

จากนั้น ทดลองนำ โทรศัพท์มือถือ แอนดรอยด์ เปิด บลูทูธ แล้ว ดาวน์โหลดและติดตั้ง โปรแกรม Arduino Bluetooth RC Car ดังนี้


สังเกตุ เมื่อเปิดขึ้นมา รูปวงกลมซ้ายมือ จะเป็นสีแดง

คลิกที่ ไอคอนเฟือง ขวามือสุด แล้ว เลือก Connect to car

เลือก HC-05 (ถ้าถามหา พาสเวิร์ด ให้คีย์ 1234)

สังเกตุ รูปวงกลมซ้ายมือเป็นสีเขียวแสดงว่า โปรแกรมสามารถใช้งานได้แล้ว ทดลองควบคุมดูเลยครับ

เมื่อล้อรถหมุน ตรวจสอบการหมุนของล้อ ว่าถูกต้องหรือไม่ ถ้าไม่ถูกต้องตรวจสอบแก้ไขการต่อสายต่างๆ ขั้วของมอเตอร์ถูกต้องหรือไม่

ถ้าทุกอย่างถูกต้อง รถบังคับ Arduino จาก แผ่น CD เก่า ของเรา ก็พร้อมใช้งานแล้วครับ

วีดีโอผลลัพธ์การทำงานของ ประดิษฐ์รถบังคับจากแผ่นซีดี ควบคุมด้วยแอพแอนดรอยด์