
อุปกรณ์ที่ต้องใช้ก็คือ
1. 2WD Smart Robot Car Chassis Kits
2. Arduino UNO R3 - Made in italy
3. เซนเซอร์ Ultrasonic Module HC-SR04
4. Mounting Bracket for HC-SR04 Ultrasonic Module แบบยาว
5. Motor Drive Module L298N
6. สาย Jumper Female to Male ยาว 20cm.
7. สาย Jumper Male to Male ยาว 20cm.
8. รางถ่านแบบ 18650 ใส่ถ่าน 2 ก้อน
9. แบตเตอรี่ลิเธียม 18650 จำนวน 2 ก้อน
10. เสารองแผ่นพีซีบีโลหะแบบเหลี่ยม 6 mm
เริ่มต้นด้วยการ ประกอบ 2WD Smart Car Robot Chassis Kits

เชื่อมต่อ รางถ่าน 18650 กับ Motor Drive Module L298N
และ Motor Drive Module L298N กับ Arduino UNO R3
ภาพต่อวงจรทั้งหมดตามรูป

*** VCC ของ Arduino UNO R3 คือ 5V ***

หมายเหตุ : ที่ Motor Drive Module L298N ถ้ามี Jumper อยู่ที่ขา ENA และ ENB ของ บอร์ด L298N ให้ถอดออก



เชื่อมต่อ Ultrasonic Module HC-SR04 กับ Arduino UNO R3 ดังรูป


NewPing.h คือไลบรารี่ NewPing เป็น ไลบรารี่ ฟังก์ชัน ที่มีผู้พัฒนาเตรียมพร้อมไว้ให้เราแล้ว โดยให้ไปดาวน์โหลด ไลบรารี่ NewPing ได้ที่
https://bitbucket.org/teckel12/arduino-new-ping/downloads
เรียนรู้ วิธีเพิ่มไลบรารี่ NewPing และ การทำงานของ Ultrasonic Module HC-SR04 ได้ที่
https://robotsiam.blogspot.com/2016/09/ultrasonic-module-hc-sr04.html
ทดสอบการทำงานของ HC-SR04 โดย เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด Arduino UNO R3
#include <NewPing.h>
NewPing sonar(10, 11);
long inches;
void setup() {
Serial.begin(9600);
}
void loop() {
delay(50);
inches = sonar.ping_in();
Serial.print(inches);
Serial.print(" in.");
Serial.print("\n");
}
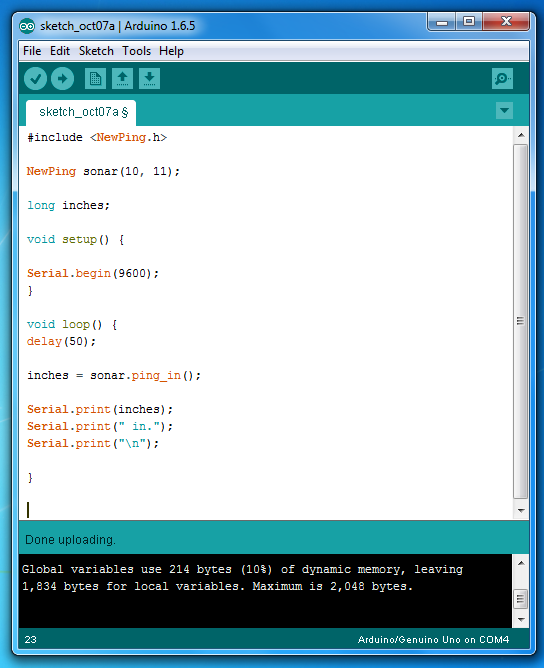
เมื่อ Upload เสร็จ ให้เปิด Serial Monitor ขึ้นมา โดยไปที่ Tools -> Serial Monitor

ทดสอบการทำงาน เซนเซอร์ HC-SR04 กับ Arduino UNO R3 โดย ทดลอง เอามือ หรือ วัตถุอื่นๆ เคลื่อนไหว ขึ้นลง หน้าจุดรับสัญญาณ อัลตร้าโซนิค HC-SR04

ที่ Serial Monitor จะแสดงค่า ระยะความห่างของมือเรากับ HC-SR04 หน่วยเป็น นิ้ว (inch) ตามที่เราเครื่อนไหว แสดงว่า โมดูลอัลตร้าโซนิค HC-SR04 ของเรา นั้นพร้อมใช้งานแล้วครับ


หลังจากนั้นให้ทดสอบเบื้องต้น ว่าการหมุนของล้อถูกต้องหรือไม่ โดย
เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด Arduino UNO R3
// Motor A pins (enableA = enable motor, pinA1 = forward, pinA2 = backward)
int enableA = 3;
int pinA1 = 6;
int pinA2 = 7;
//Motor B pins (enabledB = enable motor, pinB2 = forward, pinB2 = backward)
int enableB = 5;
int pinB1 = 8;
int pinB2 = 9;
//This lets you run the loop a single time for testing
boolean run = true;
void setup() {
pinMode(enableA, OUTPUT);
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(enableB, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop() {
if (run) {
delay(2000);
enableMotors();
//Go forward
forward(200);
//Go backward
backward(200);
//Turn left
turnLeft(400);
coast(200);
//Turn right
turnRight(400);
coast(200);
//This stops the loop
run = false;
}
}
//Define high-level H-bridge commands
void enableMotors()
{
motorAOn();
motorBOn();
}
void disableMotors()
{
motorAOff();
motorBOff();
}
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//enable motors
void motorAOn()
{
digitalWrite(enableA, HIGH);
}
void motorBOn()
{
digitalWrite(enableB, HIGH);
}
//disable motors
void motorAOff()
{
digitalWrite(enableB, LOW);
}
void motorBOff()
{
digitalWrite(enableA, LOW);
}
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
ถอดสาย USB ระหว่าง Arduino กับ คอมพิวเตอร์ออก ใส่ แบตเตอรี่ลิเธียม 18650 จำนวน 2 ก้อน ไปที่ รางถ่าน และ ตรวจสอบขั้วของแบตเตอรี่ ใส่ถุกต้องหรือไม่ และ หาอุปกรณ์ที่สามารถยกตัวรถ 2WD smart car chassis ขึ้นแล้ว หรือใช้มือยกไว้ โดยล้อไม่แตะพื้น เพือทดสอบการหมุนของล้อว่าถูกต้องหรือไม่


โปรแกรมนี้จะทำงานเพียง 1 ครั้ง ถ้าต้องการทดลองใหม่ให้ถอด แบตเตอรี่ออก (หรือ ปิดเปิด สวิทช์ไฟใหม่) แล้วใส่เข้าไปใหม่ เมื่อล้อหมุน ตรวจสอบการหมุน ขอล้อต่างๆถูกต้องหรือไม่ ถ้าต่อวงจรถูกต้อง ล้อ ทั้งสองข้างจะหมุนไปข้างหน้า 1ครั้ง กลับหลัง 1 ครั้ง และ เดินหน้าอีกหนึ่งครั้งแล้วจึงหยุด ถ้าไม่ถูกต้องให้แก้ไข เช่นการต่อขั้วของมอเตอร์ผิด เป็นต้น
ถ้าทุกอย่างถูกต้อง ทดลอง ยกลงวางที่พื้นแล้วทดสอบ อีกครั้ง ถอด แบตเตอรี่ออก (หรือ ปิดเปิด สวิทช์ไฟใหม่) แล้วใส่เข้าไปใหม่ ถ้าทุกอย่างถูกต้อง รถจะเคลื่อนไปข้างหน้า-ถอยหลัง แล้ว เลี้ยวซ้าย แล้ว จึงกลับสู่ตำแหน่งเดิม

หลังจากนั้นทดสอบ หุ่นยนต์หลบสิ่งกีดขวาง Arduino 2WD ได้โดย Upload โค้ดนี้ ไปยัง บอร์ด Arduino UNO R3
#include <NewPing.h>
//Tell the Arduino where the sensor is hooked up
NewPing sonar(10, 11);
int enableA = 3;
int pinA1 = 6;
int pinA2 = 7;
int enableB = 5;
int pinB1 = 8;
int pinB2 = 9;
long inches;
void setup() {
pinMode(enableA, OUTPUT);
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(enableB, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop() {
//Run the motors at slightly less than full power
analogWrite(enableA, 200);
analogWrite(enableB, 200);
//Ping the sensor and determine the distance in inches
inches = sonar.ping_in();
//If the robot detects an obstacle less than four inches away, it will back up, then turn left; if no obstacle is detected, it will go forward
if (inches < 4) {
analogWrite(enableA, 255);
analogWrite(enableB, 255);
backward(400);
coast(200);
turnLeft(400);
coast(200);}
else {
forward(1);
}
}
//Define high-level H-bridge commands
void enableMotors()
{
motorAOn();
motorBOn();
}
void disableMotors()
{
motorAOff();
motorBOff();
}
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//enable motors
void motorAOn()
{
digitalWrite(enableA, HIGH);
}
void motorBOn()
{
digitalWrite(enableB, HIGH);
}
//disable motors
void motorAOff()
{
digitalWrite(enableB, LOW);
}
void motorBOff()
{
digitalWrite(enableA, LOW);
}
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
ทดลอง ยกลงวางที่พื้นแล้ว หาสิ่งกีดขวาง ทดสอบ อีกครั้ง จากรถจะกลายเป็น "หุ่นยนต์หลบสิ่งกีดขวาง"
หมายเหตุ : หากต้องการเพิ่มการแสดงผลการทำงาน ของ "หุ่นยนต์หลบสิ่งกีดขวาง" ได้ดังนี้
อุปกรณ์ที่ต้องเพิ่มเติมก็คือ
1. หลอดไฟ LED สีเขียว จำนวน 1 ตัว
2. หลอดไฟ LED สีแดง จำนวน 1 ตัว
3. หลอดไฟ LED สีเหลือง จำนวน 1 ตัว
4. รีซิสเตอร์ 220 Ohm 1/4 Watt 5% จำนวน 3 ตัว
ต่อวงจรเพิ่มดังนี้



เปิดโปรแกรม Arduino (IDE) และ Upload โค้ดนี้ ไปยัง บอร์ด Arduino UNO R3
#include <NewPing.h>
//Tell the Arduino where the sensor is hooked up
NewPing sonar(10, 11);
int enableA = 3;
int pinA1 = 6;
int pinA2 = 7;
int enableB = 5;
int pinB1 = 8;
int pinB2 = 9;
long inches;
void setup() {
pinMode(enableA, OUTPUT);
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(enableB, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
pinMode(2, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
}
void loop() {
//Run the motors at slightly less than full power
analogWrite(enableA, 200);
analogWrite(enableB, 200);
//Ping the sensor and determine the distance in inches
inches = sonar.ping_in();
//If the robot detects an obstacle less than four inches away, it will back up, then turn left; if no obstacle is detected, it will go forward
if (inches < 5) {
analogWrite(enableA, 255);
analogWrite(enableB, 255);
digitalWrite(2, LOW);
digitalWrite(12, LOW);
digitalWrite(13, HIGH);
backward(400);
coast(200);
turnLeft(400);
coast(200);
}
else if (inches >= 5 and inches < 30 ) {
forward(1);
digitalWrite(2, LOW);
digitalWrite(12, HIGH);
digitalWrite(13, LOW);
}
else {
forward(1);
digitalWrite(2, HIGH);
digitalWrite(12, LOW);
digitalWrite(13, LOW);
}
}
//Define high-level H-bridge commands
void enableMotors()
{
motorAOn();
motorBOn();
}
void disableMotors()
{
motorAOff();
motorBOff();
}
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//Define low-level H-bridge commands
//enable motors
void motorAOn()
{
digitalWrite(enableA, HIGH);
}
void motorBOn()
{
digitalWrite(enableB, HIGH);
}
//disable motors
void motorAOff()
{
digitalWrite(enableB, LOW);
}
void motorBOff()
{
digitalWrite(enableA, LOW);
}
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}
การแสดงผลของ LED คือ
1. เมื่อไม่มีสิ่งกีดขวาง หรือมีสิ่งกีดขวางในระยะมากกว่า 30 นิ้ว LED สีเขียวจะติด
2. เมื่อมีสิ่งกีดขวางในระยะ 5 - 30 นิ้ว LED สีเหลืองจะติด
3. เมื่อมีสิ่งกีดขวางในระยะ น้อยกว่า 5 นิ้ว LED สีแดงจะติด
วีดีโอผลลัพธ์การทำงานของ โปรเจค หุ่นยนต์หลบสิ่งกีดขวาง Arduino 2WD