
เซ็นเซอร์วัดระยะทาง
สำหรับเซ็นเซอร์วัดระยะทาง สามารถนำไปใช้ในการวัดขนาดสิ่งของ ตรวจจับสิ่งกีดขวางได้ โดยในด้าน Smart Farm มักนำไปใช้วัดระดับน้ำในถังน้ำ หรือนำไปใช้วัดระดับน้ำในบ่อน้ำ เพื่อให้แจ้งเตือน หรือเติมนำอัตโนมัติ สำหรับเซ็นเซอร์วัดระยะห่างจะมีทั้งแบบใช้แสง และใช้คลื่นเสียง
BLE
BLE ย่อมาจาก Bluetooth Low Energy หรืออาจแปลเป็นไทยได้ว่า บลูทูธพลังงานต่ำ ตามหลักแล้วอุปกรณ์ BLE จะใช้พลังงานน้อยมาก ๆ บางอุปกรณ์เครมว่าสามารถอยู่ได้ต่อเนื่องนาน 1 ปี โดยใช้พลังงานจากถ่านกระดุมเพียงก้อนเดียว
หุ่นยนต์หลบหลีกสิ่งกีดขวาง ส่งค่าผ่าน Bluetooth
โดยในโปรเจคนี้เราจะสร้างหุ่นยนต์หลบหลีกสิ่งกีดขวาง ส่งค่าผ่าน Bluetooth โดยให้หุ่นยนต์ตัดสินใจโดยอัตโนมัติ ด้วยการวัดระยะทาง จาก สิ่งกีดขวาง และ เมื่อมีสิ่งกีดขวางอยู่ในระยะที่กำหนดไว้ ในตัวอย่างคือ น้อยกว่า 20 เซ็นติเมตร ให้หุ่นยนต์ ถอยหลัง แล้ว เลี้ยวซ้าย หลบสิ่งกีดขวางนั้นเสมอ โดยในขณะที่ทำงานจะให้ส่งค่าระยะทางที่วัดได้ ส่งค่าผ่านทาง Bluetooth มายัง สมาร์ทโฟน ของเราด้วย
### อุปกรณ์ที่ใช้ ###
1 . 4WD Smart Robot Car Chassis Kits
2. DevKitC V2 ESP32 Development Board
3. Micro USB Cable Wire 1m
4. Breadboard 8.5CM x 5.5CM 400 holes // จำนวน 2 ชิ้น
5. Motor Driver Module L298N
6. สกรูหัวกลม+น็อตตัวเมีย ขนาด 3มม ยาว 12มม
7. Jumper 20cm Male to Male
8. Jumper 20cm Female to Male
9. เพาเวอร์สวิตซ์สำหรับเปิดปิด
10. รางถ่าน 18650 แบบ 2 ก้อน
11. ถ่านชาร์จ 18650 Panasonic NCR18650B 3.7v 3400mAh // จำนวน 2 ก้อน
12. HY-SRF05 SRF05 Ultrasonic Distance Sensor Module
13. Mounting Bracket for HC-SR04 แบบสั้น
...
โดยการทำโปรเจคมีขั้นตอนดังนี้
1.ติดตั้ง Arduino core for ESP32
ลิงค์การติดตั้ง Arduino core for ESP32
https://robotsiam.blogspot.com/2017/09/arduino-core-for-esp32.html
2.ประกอบหุ่นยนต์ DevKitC ESP32
ลิงค์การประกอบหุ่นยนต์ DevKitC ESP32
https://robotsiam.blogspot.com/2017/11/esp32-4.html
3.ทดสอบการเคลื่อนที่ของหุ่นยนต์
ลิงค์ทดสอบการเคลื่อนที่ของหุ่นยนต์
https://robotsiam.blogspot.com/2017/11/esp32-5-gpio-devkitc.html
4.ประกอบเซ็นเซอร์วัดระยะทาง HY-SRF05
HY-SRF05 SRF05 Ultrasonic Distance Sensor Module โมดูลวัดระยะด้วยคลื่นอัลตร้าโซนิค ใช้การสื่อสารกับไมโครคอนโทรลเลอร์ผ่านการทริกสัญญาณ สามารถวัดระยะห่างได้ตั้งแต่ 2 เซ็นติเมตร ไปจนถึง 4 เมตร ใช้แรงดันไฟฟ้า 5V การวัดระยะทางโดยใช้ โมดูล Ultrasonic มีความแม่นยำในการวัดระยะทาง การทำงานเป็นแบบคลื่นสะท้อนกลับแล้วนำมาคำนวน จึงเหมาะสำหรับมาใช้ในการหลบหลีกสิ่งกีดขวาง ตรวจจับวัตถุที่อยู่ในรัศมีที่ต้องการ

ประกอบ SRF05 เข้ากับ Mounting Bracket แล้วยึดเข้ากับหุ่นยนต์ดังรูป

เชื่อมต่อ SRF05 เข้ากับ ESP32
Trig <-> IO15 (ESP32)
Echo <-> IO2 (ESP32)
Vcc <-> 5V (Motor Driver)
GND <-> GND (ไฟ- ของ Breadboard)
เชื่อมต่อสายจาก SRF05

เข้ากับ ESP32
Trig <-> IO15
Trig <-> IO15
Echo <-> IO2

Vcc ไปที่ Motor Driver (ใช้สาย ผู้-เมีย 2 เส้น เชื่อมต่อกัน)
Vcc <-> 5V (สายสีแดงเส้นที่ 3 จากซ้ายมือ)

GND <-> GND (ไฟ- ของ Breadboard)

ภาพรวมการต่อ หุ่นยนต์หลบหลีกสิ่งกีดขวาง

เชื่อมต่อสาย Micro USB ระหว่าง คอมพิวเตอร์ กับ DevKitC ESP32

เปิด โปรแกรม Arduino IDE ขึ้นมา เขียนโปรแกรม หรือ Sketch ตามโค้ดด้านล่างนี้
const unsigned int TRIG_PIN=15;
const unsigned int ECHO_PIN=2;
const unsigned int BAUD_RATE=115200;
void setup() {
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.begin(BAUD_RATE);
}
void loop() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
const unsigned long duration= pulseIn(ECHO_PIN, HIGH);
int distance= duration/29/2;
if(duration==0){
Serial.println("Warning: no pulse from sensor");
}
else{
Serial.print("distance to nearest object:");
Serial.println(distance);
Serial.println(" cm");
}
delay(100);
}
ไปที่ Tools -> Board เลือก "ESP32 Dev Module"

ไปที่ Tools -> Port แล้วเลือกพอร์ตที่ปรากฏ (กรณีใช้เครื่องคอมพิวเตอร์ที่มี COM Port ให้เลือกตัวอื่นที่ไม่ใช่ COM1)
ในตัวอย่างเลือกเป็น "COM12"

ไปที่ Tools -> Upload Speed : เลือกเป็น "115200"




เลือก Both NL & CR และ เลือก 115200 baud
Serial Monitor จะแสดง ระยะทางที่ห่าง จาก สิ่งกีดขวาง มีหน่วยเป็น cm (เซนติเมตร)
แสดงว่า การเชื่อมต่อ SRF05 ของเรานั้นถูกต้อง และ พร้อมใช้งานแล้ว

ทดลอง ส่งค่า ระยะทางที่ห่าง จาก สิ่งกีดขวาง ผ่านทาง Bluetooth ไปยัง สมาร์ทโฟน
โดยอัพโหลด โค้ดด้านล่างนี้ ไปยัง ESP32
#include "SimpleBLE.h"
const unsigned int TRIG_PIN = 15;
const unsigned int ECHO_PIN = 2;
//long x;
int x ;
SimpleBLE ble;
String BLEname = "ESP000";
void setup() {
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.begin(115200);
Serial.setDebugOutput(true);
}
void loop() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
const unsigned long duration = pulseIn(ECHO_PIN, HIGH);
int distance = duration / 29 / 2;
x = (distance);
Serial.println(x);
if (x > 100) {
BLEname = "ESP" + String(x);
} else {
if (x > 10) {
BLEname = "ESP0" + String(x);
} else {
BLEname = "ESP00" + String(x);
}
}
Serial.println(BLEname);
ble.begin(BLEname);
delay(100);
}
เปิดการเชื่อมต่อ บลูทูธ จะพบ อุปกรณ์ที่พร้อมใช้งาน ในตัวอย่าง เช่น ESP093 รอจนเชื่อมต่อเสร็จ

ดาวน์โหลดแอป Sparks ESP Companion.apk
ไปที่
https://github.com/LiveSparks/ESP32-basic-BLE/tree/master/app




ไปที่ Tools -> Board เลือก "ESP32 Dev Module"

ไปที่ Tools -> Port แล้วเลือกพอร์ตที่ปรากฏ (กรณีใช้เครื่องคอมพิวเตอร์ที่มี COM Port ให้เลือกตัวอื่นที่ไม่ใช่ COM1)
ในตัวอย่างเลือกเป็น "COM12"

ไปที่ Tools -> Upload Speed : เลือกเป็น "115200"

กดปุ่ม  เพื่ออัพโหลด
เพื่ออัพโหลด
เพื่ออัพโหลด
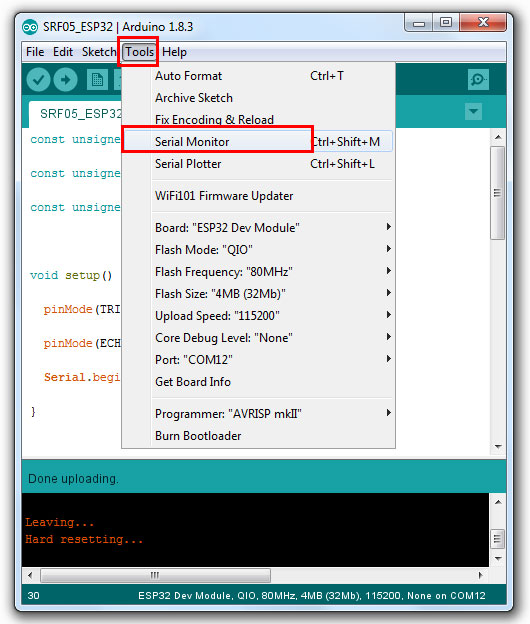
หากสามารถอัพโหลดโปรแกรมลงบอร์ดได้สำเร็จ จะแสดงคำว่า Done uploading. ที่แถบด้านล่าง

เปิดสวิตช์ไฟ จากรางถ่านเข้าสู่หุ่นยนต์
แล้วไปที่ Tools -> Serial Monitor
แล้วไปที่ Tools -> Serial Monitor
เลือก Both NL & CR และ เลือก 115200 baud
Serial Monitor จะแสดง ระยะทางที่ห่าง จาก สิ่งกีดขวาง มีหน่วยเป็น cm (เซนติเมตร)
แสดงว่า การเชื่อมต่อ SRF05 ของเรานั้นถูกต้อง และ พร้อมใช้งานแล้ว

ทดลอง ส่งค่า ระยะทางที่ห่าง จาก สิ่งกีดขวาง ผ่านทาง Bluetooth ไปยัง สมาร์ทโฟน
โดยอัพโหลด โค้ดด้านล่างนี้ ไปยัง ESP32
#include "SimpleBLE.h"
const unsigned int TRIG_PIN = 15;
const unsigned int ECHO_PIN = 2;
//long x;
int x ;
SimpleBLE ble;
String BLEname = "ESP000";
void setup() {
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.begin(115200);
Serial.setDebugOutput(true);
}
void loop() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
const unsigned long duration = pulseIn(ECHO_PIN, HIGH);
int distance = duration / 29 / 2;
x = (distance);
Serial.println(x);
if (x > 100) {
BLEname = "ESP" + String(x);
} else {
if (x > 10) {
BLEname = "ESP0" + String(x);
} else {
BLEname = "ESP00" + String(x);
}
}
Serial.println(BLEname);
ble.begin(BLEname);
delay(100);
}
เปิดการเชื่อมต่อ บลูทูธ จะพบ อุปกรณ์ที่พร้อมใช้งาน ในตัวอย่าง เช่น ESP093 รอจนเชื่อมต่อเสร็จ

ดาวน์โหลดแอป Sparks ESP Companion.apk
ไปที่
https://github.com/LiveSparks/ESP32-basic-BLE/tree/master/app

แล้วติดตั้ง ลงใน สมาร์ทโฟน แอนดรอย ของเรา ตามขั้นตอนปรกติ ทั่วไป
เมื่อติดตั้งเสร็จให้เปิดแอปขึ้นมา
เมื่อติดตั้งเสร็จให้เปิดแอปขึ้นมา

คลิกที่ Start Scanning

แอปจะแสดง ค่า ระยะทางที่ห่าง จาก สิ่งกีดขวาง เปลี่ยนค่าไปตามระยะทาง มีหน่วยเป็น cm (เซนติเมตร) แสดงว่า แอป Sparks ESP นั้นพร้อมใช้งานแล้ว

5.เขียนโค้ดหุ่นยนต์หลบหลีกสิ่งกีดขวาง ส่งค่าผ่าน Bluetooth
อัพโหลด โค้ดด้านล่างนี้ ไปยัง ESP32
/*
Obstacle Robot with DevKitC ESP32.
For more details visit:
https://robotsiam.blogspot.com/2017/12/esp32-8-bluetooth.html
*/
#include "SimpleBLE.h"
const unsigned int TRIG_PIN = 15;
const unsigned int ECHO_PIN = 2;
// Motor A pins
int pinA2 = 12;
int pinA1 = 13;
//Motor B pins
int pinB2 = 32;
int pinB1 = 33;
//long x;
int x ;
SimpleBLE ble;
String BLEname = "ESP000";
void setup() {
pinMode(TRIG_PIN, OUTPUT);
pinMode(ECHO_PIN, INPUT);
Serial.begin(115200);
Serial.setDebugOutput(true);
pinMode(pinA1, OUTPUT);
pinMode(pinA2, OUTPUT);
pinMode(pinB1, OUTPUT);
pinMode(pinB2, OUTPUT);
}
void loop() {
digitalWrite(TRIG_PIN, LOW);
delayMicroseconds(2);
digitalWrite(TRIG_PIN, HIGH);
delayMicroseconds(10);
digitalWrite(TRIG_PIN, LOW);
const unsigned long duration = pulseIn(ECHO_PIN, HIGH);
int distance = duration / 29 / 2;
x = (distance);
Serial.println(x);
if (x > 100) {
BLEname = "ESP" + String(x);
} else {
if (x > 10) {
BLEname = "ESP0" + String(x);
} else {
BLEname = "ESP00" + String(x);
}
}
Serial.println(BLEname);
ble.begin(BLEname);
if (distance < 20) {
backward(400);
coast(200);
turnLeft(1000);
}
else {
forward(1);
}
delay(100);
}
//ฟังก์ชั่นหลักในการควบคุมมอเตอร์
void forward(int time)
{
motorAForward();
motorBForward();
delay(time);
}
void backward(int time)
{
motorABackward();
motorBBackward();
delay(time);
}
void turnLeft(int time)
{
motorABackward();
motorBForward();
delay(time);
}
void turnRight(int time)
{
motorAForward();
motorBBackward();
delay(time);
}
void coast(int time)
{
motorACoast();
motorBCoast();
delay(time);
}
void brake(int time)
{
motorABrake();
motorBBrake();
delay(time);
}
//ฟังก์ชั่นรองในการควบคุมมอเตอร์
//motor A controls
void motorAForward()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, LOW);
}
void motorABackward()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, HIGH);
}
//motor B controls
void motorBForward()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, LOW);
}
void motorBBackward()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, HIGH);
}
//coasting and braking
void motorACoast()
{
digitalWrite(pinA1, LOW);
digitalWrite(pinA2, LOW);
}
void motorABrake()
{
digitalWrite(pinA1, HIGH);
digitalWrite(pinA2, HIGH);
}
void motorBCoast()
{
digitalWrite(pinB1, LOW);
digitalWrite(pinB2, LOW);
}
void motorBBrake()
{
digitalWrite(pinB1, HIGH);
digitalWrite(pinB2, HIGH);
}

วีดีโอผลลัพธ์ หุ่นยนต์หลบหลีกสิ่งกีดขวาง ส่งค่าผ่าน Bluetooth