
การจะทดสอบผลลัพธ์ การเขียนโปรแกรมคอมพิวเตอร์ และ การทำงานของ ไมโครคอนโทรลเลอร์ หุ่นยนต์ DIY (DIY ย่อมาจาก Do it yourself ซึ่งมีความหมายว่า ทำสิ่งต่างๆด้วยตัวเอง) ก็เป็นทางเลือกหนึ่ง ซึ่งทั้งให้ความรู้ และ ความสนุก ให้กับผู้ทดสอบ และ ยังใช้ประยุกต์ไปใช้ กับงานด้านอื่นๆ รวมทั้งเป็นพื้นฐานในการ พัฒนาหุ่นยนต์ ในระดับ ต่อๆไปได้อีกด้วย
ดังนั้นเราจึงเลือก สร้างหุ่นยนต์ DIY สำหรับ ไว้ใช้ ทดสอบผลลัพธ์ การเรียนรู้ การเขียนโปรแกรมคอมพิวเตอร์ และ การทำงานของ ไมโครคอนโทรลเลอร์ DevKitC ESP32 ของเรา
### อุปกรณ์ที่ใช้ ###
1 . 4WD Smart Robot Car Chassis Kits
2. DevKitC V2 ESP32 Development Board
3. Micro USB Cable Wire 1m
4. Breadboard 8.5CM x 5.5CM 400 holes // จำนวน 2 ชิ้น
5. Motor Driver Module L298N
6. สกรูหัวกลม+น็อตตัวเมีย ขนาด 3มม ยาว 12มม
7. Jumper 20cm Male to Male
8. Jumper 20cm Female to Male
9. เพาเวอร์สวิตซ์สำหรับเปิดปิด
10. รางถ่าน 18650 แบบ 2 ก้อน
.
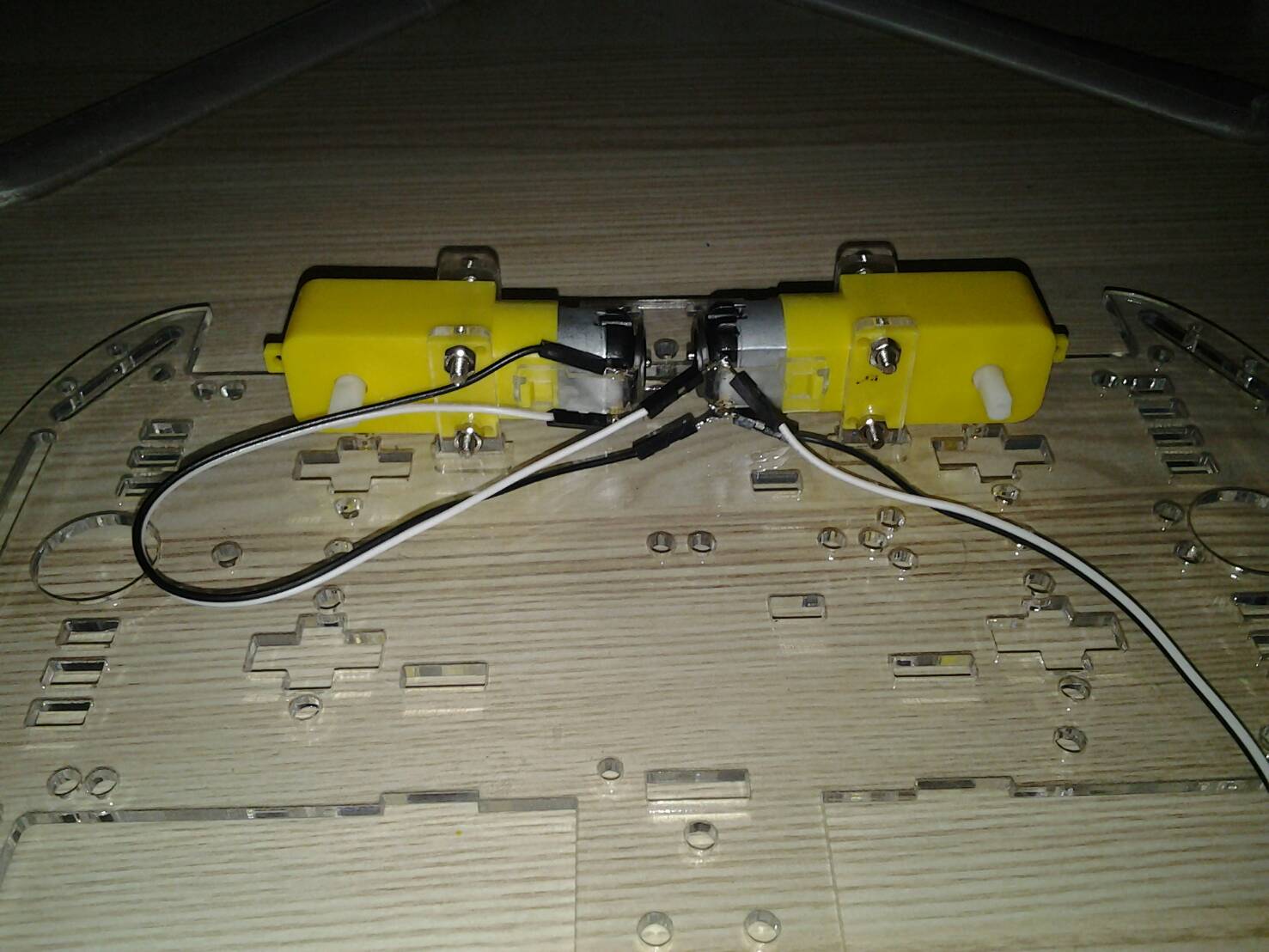
เริ่มต้น ด้วย ใช้ Jumper 20cm Male to Male ผู้-ผู้ บัดกรี เข้ากับ มอเตอร์ ทั้ง 4 ตัว โดยเลือกสีของ Jumper ให้เหมือนกัน เป็นคู่ๆ เพื่อกำหนดขั้วของมอเตอร์ และ การจับคู่มอเตอร์
*** ในตัวอย่าง ****
มอเตอร์ 2 ตัวบน ใช้ Jumper สีขาว อยู่ด้านล่าง และ สีดำ อยู่ด้านบน
มอเตอร์ 2 ตัวล่าง ใช้ Jumper สีม่วง อยู่ด้านล่าง และ สีเทา อยู่ด้านบน

ประกอบมอเตอร์ 2 ตัว ด้านบน เข้ากับโครงของหุ่นยนต์ชั้นที่ 1
โดย... เชื่อมต่อสาย สีดำ จาก มอเตอร์ตัวที่ 1 ไปยัง มอเตอร์ตัวที่ 2 ที่เป็นสายสีดำเหมือนกัน และ เชื่อมต่อสาย สีขาว จาก มอเตอร์ตัวที่ 1 ไปยัง มอเตอร์ตัวที่ 2 ที่เป็นสายสีขาวเหมือนกัน
ประกอบมอเตอร์ 2 ตัว ด้านล่าง เข้ากับโครงของหุ่นยนต์
โดย... เชื่อมต่อสาย สีเทา จาก มอเตอร์ตัวที่ 3 ไปยัง มอเตอร์ตัวที่ 4 ที่เป็นสายสีเทาเหมือนกัน และ เชื่อมต่อสาย สีม่วง จาก มอเตอร์ตัวที่ 3 ไปยัง มอเตอร์ตัวที่ 4 ที่เป็นสายสีม่วงเหมือนกัน

เมื่อประกอบเสร็จ จะเหลือสาย 2 คู่ สำหรับ ต่อเข้ากับ Motor Driver ดังรูป

ยึดเสา 6 เสา สำหรับ วาง โครงหุ่นยนต์ชั้นที่ 2

ใช้ สกรูหัวกลม+น็อตตัวเมีย 12 มม. ยึด รางถ่าน และ Motor Driver เข้า กับ โครงหุ่นยนต์ชั้นที่ 2 ดังรูป

เพื่อให้การใช้งาน DevKitC ESP32 ให้เต็มประสิทธิภาพ ได้ครบทั้ง 38 ขา จึงแนะนำให้ ประกอบ Breadboard 2 ชิ้น เข้าด้วยกัน
โดย แยกชิ้นส่วนของ Breadboard ด้านล่าง นำส่วน ไฟ + - ออกไป ดังรูป
โดย แยกชิ้นส่วนของ Breadboard ด้านล่าง นำส่วน ไฟ + - ออกไป ดังรูป

ประกอบ Breadboard 2 ชิ้น เข้าด้วยกัน ดังรูป

แล้วจึง ติดลงบน ของโครงหุ่นยนต์ชั้นที่ 2

เสียบ DevKitC ESP32 ลงไบที่ Breadboard ดังรูป

ประกอบ โครงหุ่นยนต์ชั้นที่ 2 เข้ากับ โครงหุ่นยนต์ชั้นที่ 1

เชื่อมต่อสายจากมอเตอร์ ทั้ง 2 คู่ เข้า กับ Motor Driver โดยเชื่อมต่อ สีของสายไฟ และ ด้านซ้าย- ด้านขวา ดังรูป

เชื่อมต่อ สายสีดำจากรางถ่าน ไปยัง ไฟ- (สีฟ้า) ของ Breadboard

สวิตซ์สำหรับเปิดปิด จะมี 2 ขา ให้เชื่อมต่อสายสีแดงจากรางถ่านเข้ากับ ขาของ สวิตซ์สำหรับเปิดปิด ด้านนึง และ เชื่อมต่อ จากขาของ สวิตซ์สำหรับเปิดปิด ด้านที่เหลือ ไปยัง ไปยัง ไฟ+ (สีแดง) ของ Breadboard

ใช้สายสีแดง เชื่อมต่อสาย จาก ไฟ+ (สีแดง) ของ Breadboard เข้ากับ ไฟ+ ของ Motor Driver และ ใช้สายสีน้ำตาล เชื่อมต่อ จาก ไฟ- (สีฟ้า) ของ Breadboard เข้ากับ GND ของ Motor Driver ดังรูป

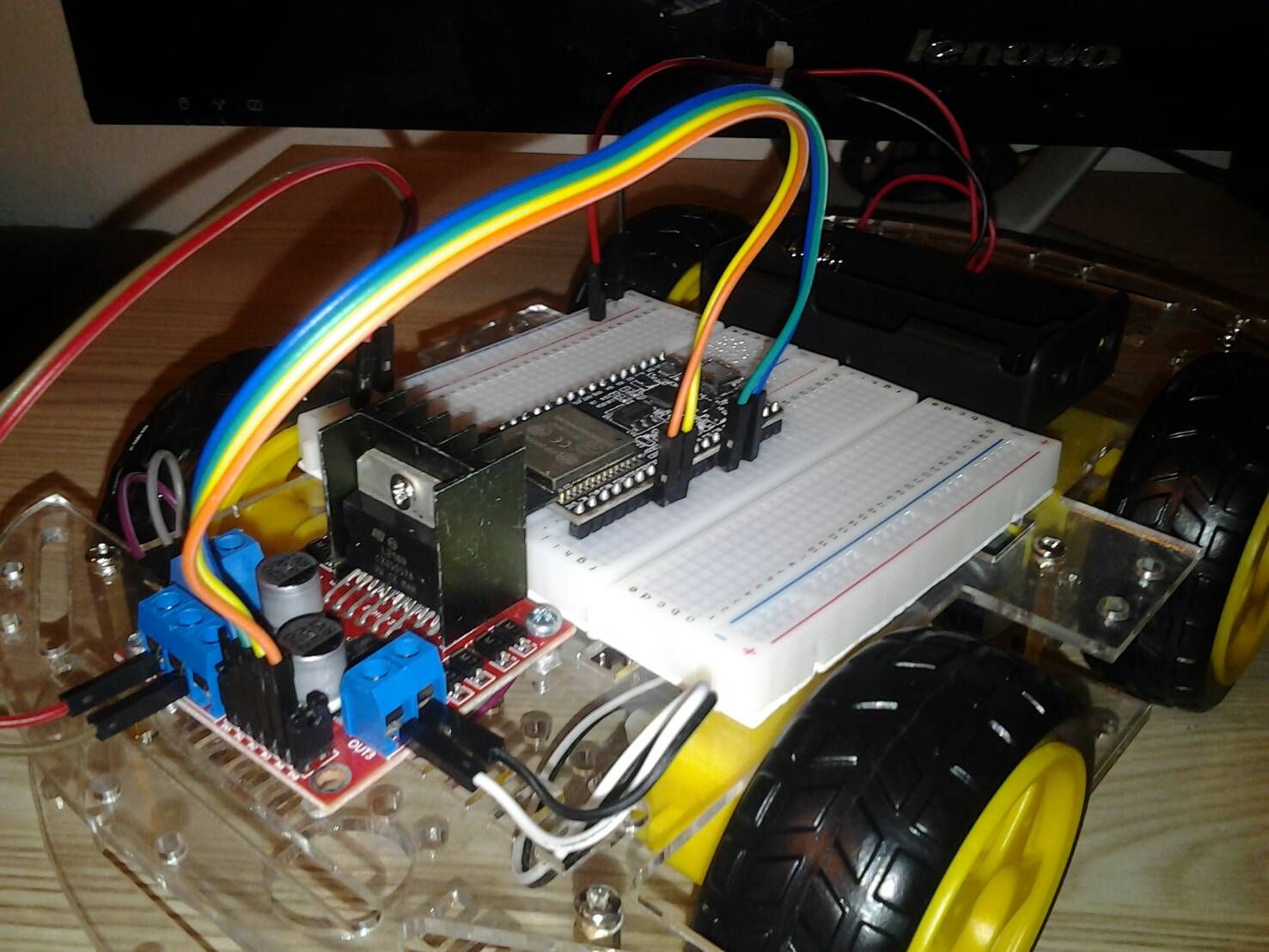
เชื่อมต่อ สายสีน้ำเงิน เข้าที่ IN1 , สายสีเขียวเข้าที่ IN2 , สายสีเหลือง เข้าที่ IN3 , สายสีส้ม เข้าที่ IN4 ของ Motor Driver ดังรูป

เชื่อมต่อไปยัง DevKitC ESP32 โดย
สายสีน้ำเงิน ไปยังขา IO13
สายสีเขียว ไปยังขา IO12
สายสีเหลือง ไปยังขา IO33
สายสีส้ม ไปยังขา IO32
สายสีน้ำเงิน ไปยังขา IO13
สายสีเขียว ไปยังขา IO12
สายสีเหลือง ไปยังขา IO33
สายสีส้ม ไปยังขา IO32

ภาพการเชื่อมต่อ ระหว่าง Motor Driver กับ DevKitC ESP32
ใช้สายสีแดง เชื่อมต่อสาย จาก ไฟ+ (สีแดง) ของ Breadboard เข้ากับ 5V และ ใช้สายสีน้ำตาล เชื่อมต่อ จาก ไฟ- (สีฟ้า) ของ Breadboard เข้ากับ GND ของ DevKitC ESP32

โดย สายสีแดงเข้าที่ขา 5V และ สายสีน้ำตาลเข้าที่ขา GND ดังรูป

ภาพรวม การประกอบหุ่นยนต์ DevKitC ESP32 ด้านซ้าย
ภาพรวม การประกอบหุ่นยนต์ DevKitC ESP32 ด้านขวา

ภาพรวม การประกอบหุ่นยนต์ DevKitC ESP32 ด้านหน้า

ถึงขั้นตอนนี้ หุ่นยนต์ DevKitC ESP32 ของเรานั้นก็พร้อมจะทำงานในขั้นตอนต่อไป