อุปกรณ์ที่ต้องใช้มีดังนี้
1. Arduino UNO R3 - Made in italy
2. Ultrasonic Sensor HC-SR04
3. Jumper (F2M) cable wire 40pcs 10 cm 2.54mm Female to Male
Ultrasonic ranging module HC-SR04
 โมดูลอัลตร้าโซนิคนี้เป็นอุปกรณ์ใช้วัดระยะทางโดยไม่ต้องมีการสัมผัสกับตำแหน่งที่ต้องการวัด วัดได้ตั้งแต่ 2 cm ถึง 400 cm โดยส่งสัญญาณอัลตร้าโซนิคความถี่ 40 kHz ไปที่วัตถุที่ต้องการวัดและรับสัญญาณที่สะท้อนกลับมา พร้อมทั้งจับเวลาเพื่อนำมาใช้ในการคำนวณระยะทาง
โมดูลอัลตร้าโซนิคนี้เป็นอุปกรณ์ใช้วัดระยะทางโดยไม่ต้องมีการสัมผัสกับตำแหน่งที่ต้องการวัด วัดได้ตั้งแต่ 2 cm ถึง 400 cm โดยส่งสัญญาณอัลตร้าโซนิคความถี่ 40 kHz ไปที่วัตถุที่ต้องการวัดและรับสัญญาณที่สะท้อนกลับมา พร้อมทั้งจับเวลาเพื่อนำมาใช้ในการคำนวณระยะทาง

Ultrasonic HC-SR04 เป็นเซ็นเซอร์ที่ใช้วัดระยะโดยใช้ sonar ให้การหาระยะของตำแหน่งวัตถุ
Features:
ใช้แรงดันประมาณ :+5V DC
Quiescent Current : <2mA
ทำงานโดยใช้กระแสประมาณ: 15mA
ความกว้างเชิงมุมในการวัด: <15°
ช่วงการวัดระยะทาง : 2cm – 400 cm/1" - 13ft
ความละเอียด : 0.3 cm
Measuring Angle: 30 degree
Trigger Input Pulse width: 10uS
Dimension: 45mm x 20mm x 15mm
หลักการทำงาน
โมดูล HC-SR04 เป็นอุปกรณ์อิเล็กทรอนิกส์ สำหรับวัดระยะห่างด้วยคลื่นอัลตราโซนิค (ใช้คลื่นเสียงความถี่ ประมาณ 40kHz) มีสองส่วนหลักคือ ตัวส่งคลื่นที่ทำหน้าที่สร้างคลื่นเสียงออกไปในการวัดระยะแต่ละครั้ง ("Ping") แล้วเมื่อไปกระทบวัตถุหรือสิ่งกีดขวาง คลื่นเสียงถูกสะท้อนกลับมายังตัวรับแล้วประมวลผลด้วยวงจรอิเล็กทรอนิกส์ภายในโมดูล ถ้าจับเวลาในการเดินทางของคลื่นเสียงในทิศทางไปและกลับ และถ้าทราบความเร็วเสียงในอากาศ ก็จะสามารถคำนวณระยะห่างจากวัตถุกีดขวางได้
ต่อวงจรตามรูป


ทดสอบการทำงาน
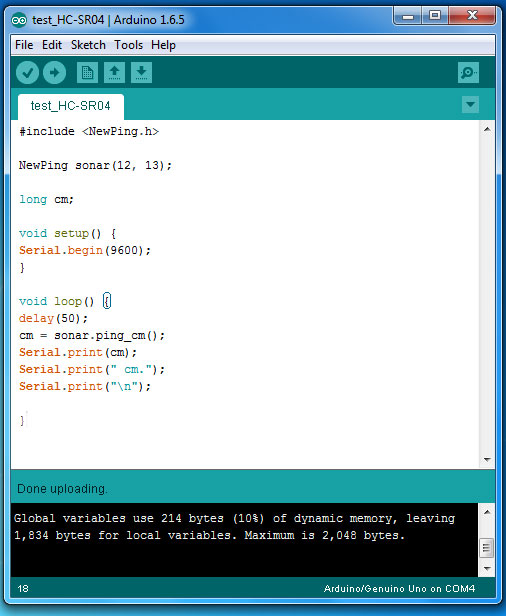
เปิดโปรแกรม Arduino (IDE) เขียนโค้ด ดังนี้
จากนั้นให้ทดลอง Verify / Compile

จะขึ้น Error ว่า ค้าหาเฮดเดอร์ไฟล์ Newping.h ไม่พบ (เป็นเพราะเรายังไม่ได้เพิ่ม ไลบรารี่ NewPing)

จากนั้นให้ทำการเพิ่ม ไลบรารี่ NewPing ให้กับ Arduino (IDE) ของเรา ตามรูป



เมื่อทดลอง Verify / Compile อีกครั้ง จะได้ตามปรกติแล้ว

จากนั้นให้ Upload ไปยัง บอร์ด Arduino UNO R3



1. Arduino UNO R3 - Made in italy
2. Ultrasonic Sensor HC-SR04
3. Jumper (F2M) cable wire 40pcs 10 cm 2.54mm Female to Male
Ultrasonic ranging module HC-SR04


Ultrasonic HC-SR04 เป็นเซ็นเซอร์ที่ใช้วัดระยะโดยใช้ sonar ให้การหาระยะของตำแหน่งวัตถุ
Features:
ใช้แรงดันประมาณ :+5V DC
Quiescent Current : <2mA
ทำงานโดยใช้กระแสประมาณ: 15mA
ความกว้างเชิงมุมในการวัด: <15°
ช่วงการวัดระยะทาง : 2cm – 400 cm/1" - 13ft
ความละเอียด : 0.3 cm
Measuring Angle: 30 degree
Trigger Input Pulse width: 10uS
Dimension: 45mm x 20mm x 15mm
หลักการทำงาน
โมดูล HC-SR04 เป็นอุปกรณ์อิเล็กทรอนิกส์ สำหรับวัดระยะห่างด้วยคลื่นอัลตราโซนิค (ใช้คลื่นเสียงความถี่ ประมาณ 40kHz) มีสองส่วนหลักคือ ตัวส่งคลื่นที่ทำหน้าที่สร้างคลื่นเสียงออกไปในการวัดระยะแต่ละครั้ง ("Ping") แล้วเมื่อไปกระทบวัตถุหรือสิ่งกีดขวาง คลื่นเสียงถูกสะท้อนกลับมายังตัวรับแล้วประมวลผลด้วยวงจรอิเล็กทรอนิกส์ภายในโมดูล ถ้าจับเวลาในการเดินทางของคลื่นเสียงในทิศทางไปและกลับ และถ้าทราบความเร็วเสียงในอากาศ ก็จะสามารถคำนวณระยะห่างจากวัตถุกีดขวางได้
ต่อวงจรตามรูป
UNO <--> HC-SR04
VCC <--> VCC
GND <--> GND
D12 <--> Trig
D13 <--> Echo

เปิดโปรแกรม Arduino (IDE) เขียนโค้ด ดังนี้
#include <NewPing.h>
NewPing sonar(12, 13); //ให้ Pin 12 และ 13 เป็นขาของเซนเซอร์ เรียกใช้งานคำสั่งจาก Library
long cm; //ประกาศตัวแปร cm ให้เป็นข้อมูลชนิดจำนวนเต็ม -2147483648 ถึง 2147483649
void setup()
{
{
Serial.begin(9600); //ตั้งค่าความเร็วในการรับ-ส่งข้อมูล ค่ามาตรฐาน คือ 9600
}
void loop()
{
{
delay(50);
cm = sonar.ping_cm(); //รับค่าจาก Library NewPing หน่วยเป็น เซ็นติเมตร
Serial.print(cm); //พิมพ์ค่าที่ได้ออกมา
Serial.print(" cm."); //พิมพ์ cm ต่อท้าย ค่าที่ได้รับ
Serial.print("\n");
}
จากนั้นให้ทดลอง Verify / Compile
จะขึ้น Error ว่า ค้าหาเฮดเดอร์ไฟล์ Newping.h ไม่พบ (เป็นเพราะเรายังไม่ได้เพิ่ม ไลบรารี่ NewPing)
ไลบรารี่ NewPing คือ ไลบรารี่ ฟังก์ชัน ที่มีผู้พัฒนาเตรียมพร้อมไว้ให้เราแล้ว โดยให้ไปดาวน์โหลด ไลบรารี่ NewPing ได้ที่
https://bitbucket.org/teckel12/arduino-new-ping/downloads
https://bitbucket.org/teckel12/arduino-new-ping/downloads
จากนั้นให้ทำการเพิ่ม ไลบรารี่ NewPing ให้กับ Arduino (IDE) ของเรา ตามรูป
เลือกไฟล์ ไลบรารี่ NewPing .ZIP ที่เรา ดาวน์โหลดมาอยู่ในคอมพิวเตอร์ของเรา จากนั้นคลิก Open โปรแกรม จะเพิ่ม ไลบรารี่ NewPing เข้าสู่ Arduino (IDE) ของเรา
เมื่อเข้าดูที่ Include Library จะพบ ไลบรารี่ NewPing เพิ่มเข้ามาด้านล่างสุด
(สามารถใช้วิธีการเดียวกันนี้ ในการ การเพิ่ม ไลบรารี่ ฟังก์ชัน อื่นๆ ได้เช่นกัน )
(สามารถใช้วิธีการเดียวกันนี้ ในการ การเพิ่ม ไลบรารี่ ฟังก์ชัน อื่นๆ ได้เช่นกัน )
เมื่อทดลอง Verify / Compile อีกครั้ง จะได้ตามปรกติแล้ว
จากนั้นให้ Upload ไปยัง บอร์ด Arduino UNO R3
เมื่อ Upload เสร็จ ให้เปิด Serial Monitor ขึ้นมา โดยไปที่ Tools -> Serial Monitor
ทดลอง เอามือ หรือ วัตถุอื่นๆ เครื่อนไหว ขึ้นลง หน้าจุดรับสัญญาณ อัลตร้าโซนิค HC-SR04

ที่ Serial Monitor จะแสดงค่า ระยะความห่างของมือเรากับ HC-SR04 หน่วยเป็น เซ็นติเมตร (cm) ตามที่เราเครื่อนไหว แสดงว่า โมดูลอัลตร้าโซนิค HC-SR04 ของเรา นั้นพร้อมใช้งานแล้วครับ