การสร้างแอพ Blynk สำหรับควบคุมหุ่นยนต์ ESP32
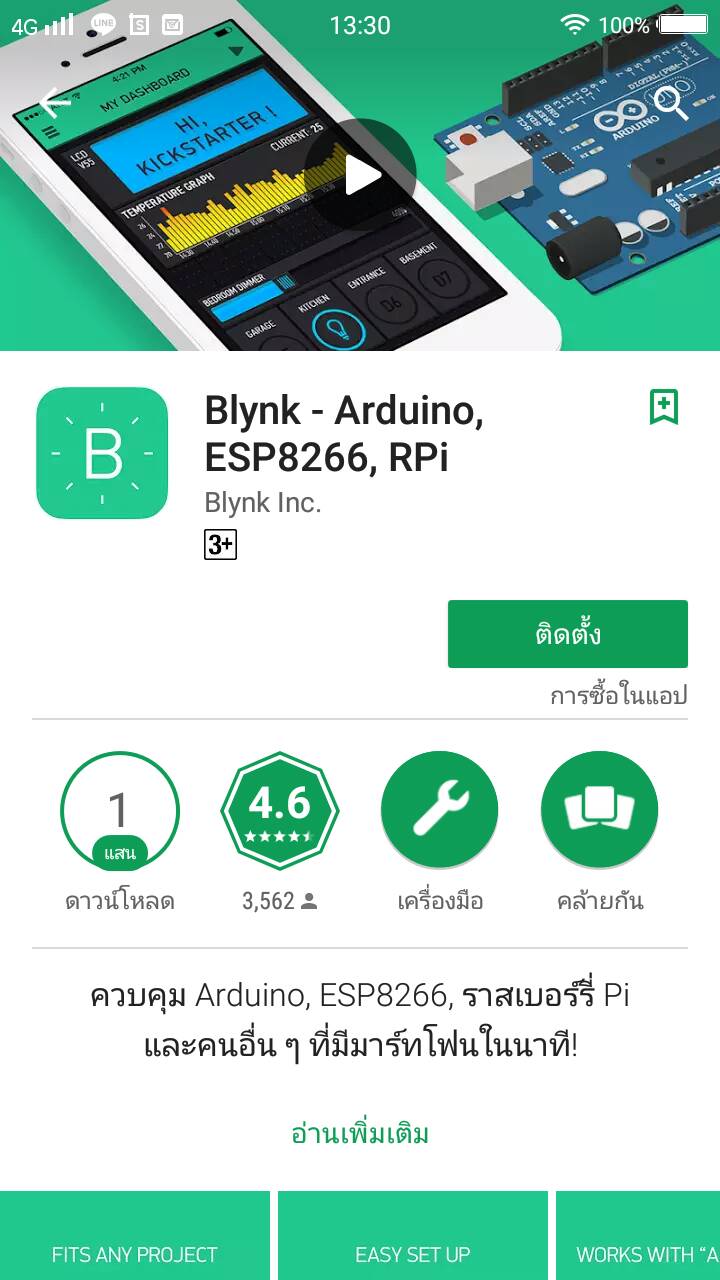
Blynk Application เป็นโปรแกรมบนมือถือที่ทำให้เราสร้างหน้าต่างควบคุมหรือแสดงผลเชื่อมต่อกับพวกไมโครคอนโทรเลอร์(Ardunio, ESP8266, Raspberry Pi) ได้ง่ายๆ โดยไปที่ Play Store ค้นหา Blynk
ติดตั้ง เหมือน App ทั่วๆไป

เปิด App ขึ้นมา สร้าง Account ใหม่ หรือ Log In ถ้าเคยสร้าง Account ไว้แล้ว หรือ สามามารถ Log In ด้วย Facebook ก็ได้เช่นกัน


กรอก อีเมล และ พาสเวิด -> Sign Up

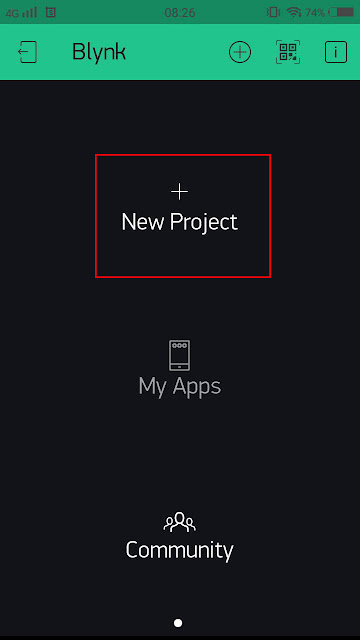
เลือก New Project
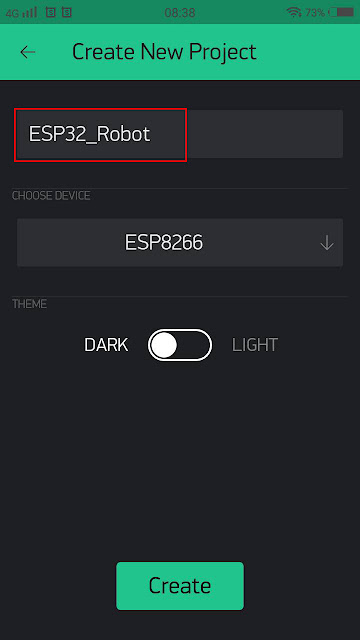
ตั้งชื่อ Project ในตัวอย่างชื่อ ESP32_Robot
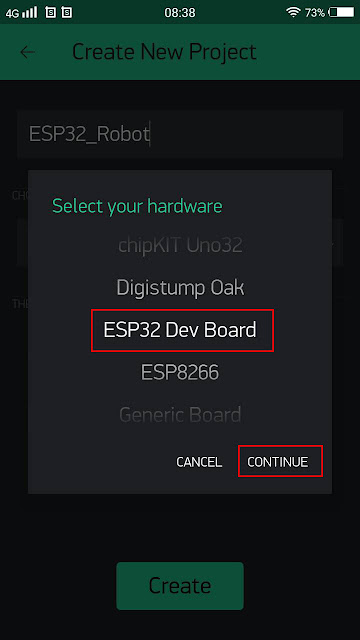
เลือก hardware เป็น ESP32 Dev Board -> CONTINUE
โปรกรม จะส่ง Auth Toke ไปที่ อีเมล ที่เรากรอกไว้ -> OK
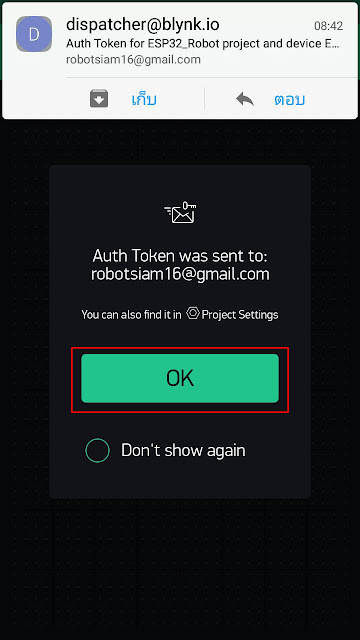
โดยทุกๆครั้งที่เริ่มสร้างโปรเจคใหม่ Auth Token จะถูกเปลี่ยนใหม่เสมอ ซึ่ง KEY นี้เองที่เป็นเสมือนกุญแจสำหรับเชื่อมต่อ
คลิก เครื่องหมาย +

คลิก เพิ่ม Button

จะมี ปุ่ม BUTTON เพิ่มเข้ามาที่หน้าจอ แล้วจึง คลิกที่ BUTTON เพื่อตั้งค่า


เลือก Virtual -> V1 -> CONTINUE

เลือก ลูกศร กลับไปหน้าเดิม

ลาก Button V1 ไว้กลางหน้าจอ

เพิ่ม Button อีก 4 ปุ่ม ตั้งค่า จัดวางตำแหน่ง ตามรูป
ปุ่ม LEFT เลือก Virtual -> V2 -> CONTINUE
ปุ่ม BACK เลือก Virtual -> V3 -> CONTINUE
ปุ่ม RIGHT เลือก Virtual -> V4 -> CONTINUE
ปุ่ม STOP เลือก Virtual -> V5 -> CONTINUE

ถึงขั้นตอนนี้ แอพ Blynk สำหรับ ควบคุมหุ่นยนต์ ESP32 ผ่าน WiFi ก็พร้อมทำงาน ในขั้นตอนต่อไป
Blynk Application เป็นโปรแกรมบนมือถือที่ทำให้เราสร้างหน้าต่างควบคุมหรือแสดงผลเชื่อมต่อกับพวกไมโครคอนโทรเลอร์(Ardunio, ESP8266, Raspberry Pi) ได้ง่ายๆ โดยไปที่ Play Store ค้นหา Blynk
ติดตั้ง เหมือน App ทั่วๆไป
เปิด App ขึ้นมา สร้าง Account ใหม่ หรือ Log In ถ้าเคยสร้าง Account ไว้แล้ว หรือ สามามารถ Log In ด้วย Facebook ก็ได้เช่นกัน

ในกรณี เลือก Create New Account

กรอก อีเมล และ พาสเวิด -> Sign Up

เลือก New Project

ตั้งชื่อ Project ในตัวอย่างชื่อ ESP32_Robot

เลือก hardware เป็น ESP32 Dev Board -> CONTINUE

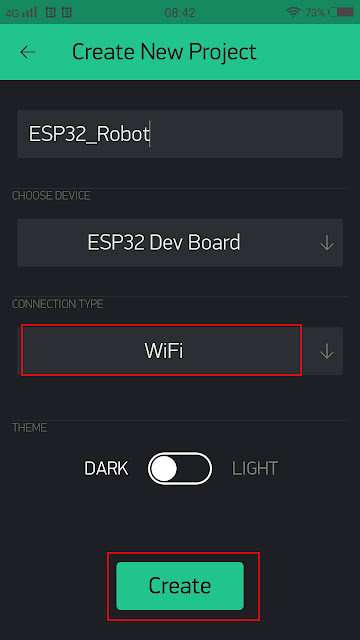
เลือก WiFi -> Create

โปรกรม จะส่ง Auth Toke ไปที่ อีเมล ที่เรากรอกไว้ -> OK

คลิก เครื่องหมาย +

คลิก เพิ่ม Button

จะมี ปุ่ม BUTTON เพิ่มเข้ามาที่หน้าจอ แล้วจึง คลิกที่ BUTTON เพื่อตั้งค่า

เปลี่ยนชื่อ Button เป็น FORWARD

เลือก Virtual -> V1 -> CONTINUE

เลือก ลูกศร กลับไปหน้าเดิม

ลาก Button V1 ไว้กลางหน้าจอ

ปุ่ม LEFT เลือก Virtual -> V2 -> CONTINUE
ปุ่ม BACK เลือก Virtual -> V3 -> CONTINUE
ปุ่ม RIGHT เลือก Virtual -> V4 -> CONTINUE
ปุ่ม STOP เลือก Virtual -> V5 -> CONTINUE

ถึงขั้นตอนนี้ แอพ Blynk สำหรับ ควบคุมหุ่นยนต์ ESP32 ผ่าน WiFi ก็พร้อมทำงาน ในขั้นตอนต่อไป